Projects
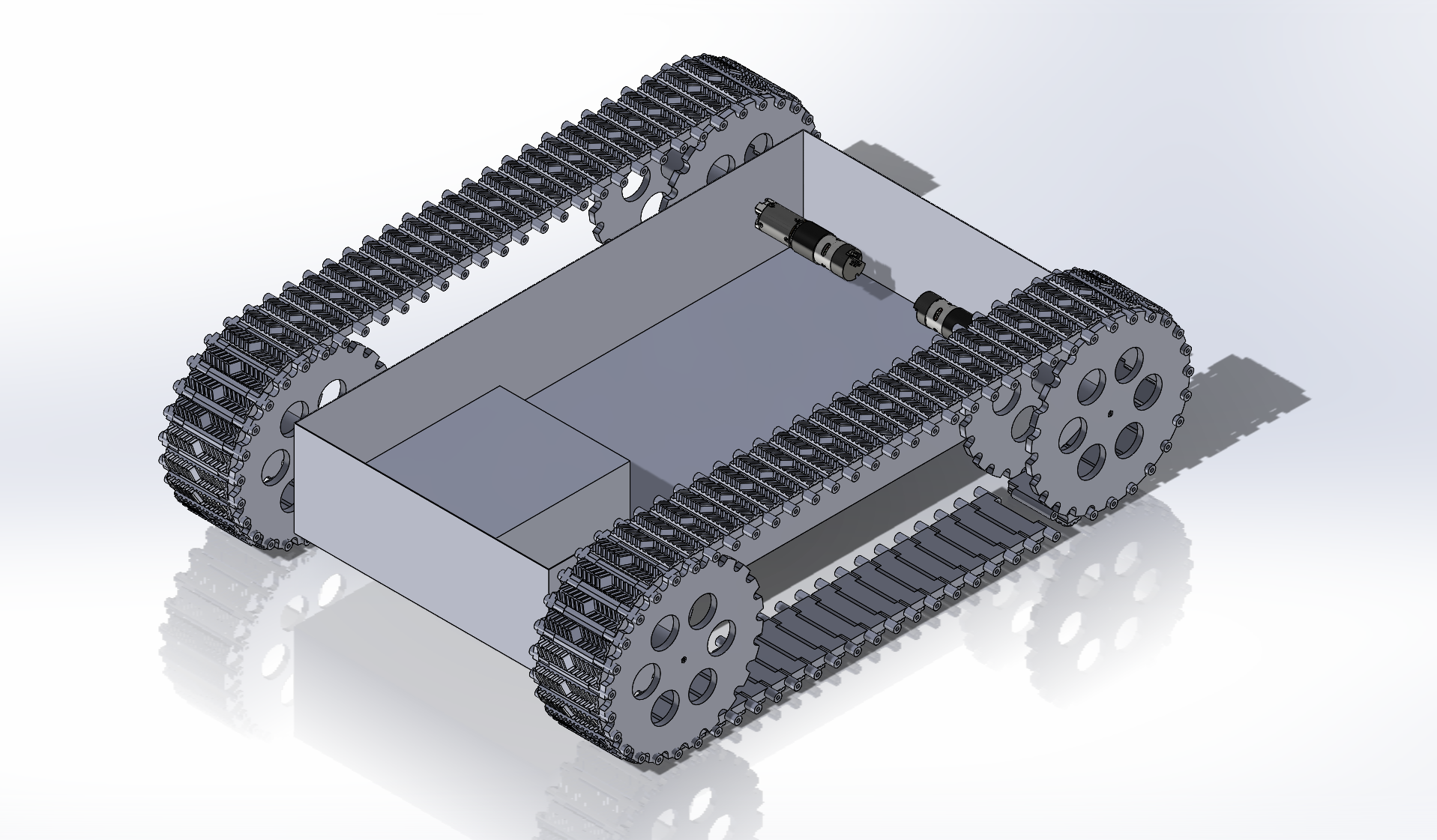
EOD Bomb Squad Robot
Currently developing a low-cost, teleoperated bomb squad robot for X-Ray system deployment and explosive ordnance disposal applications. The project focuses on designing an open-source drivetrain capable of navigating uneven terrain and steep inclines, while minimizing cost through 3D printed components, off the shelf materials, and simplified mechanical design.

MURI Hydrodynamic Research
Contributed for three years to ONR MURI research in the Moored Laboratory at Lehigh University. The main focus of the research is on bio-inspired flexible propulsors and non-traditional hydrodynamic propulsion. The work involved supporting watertunnel experiments, improving experimental designs in SolidWorks, and machining and assembling equipment for the Pitch and Heave hydrofoil project.
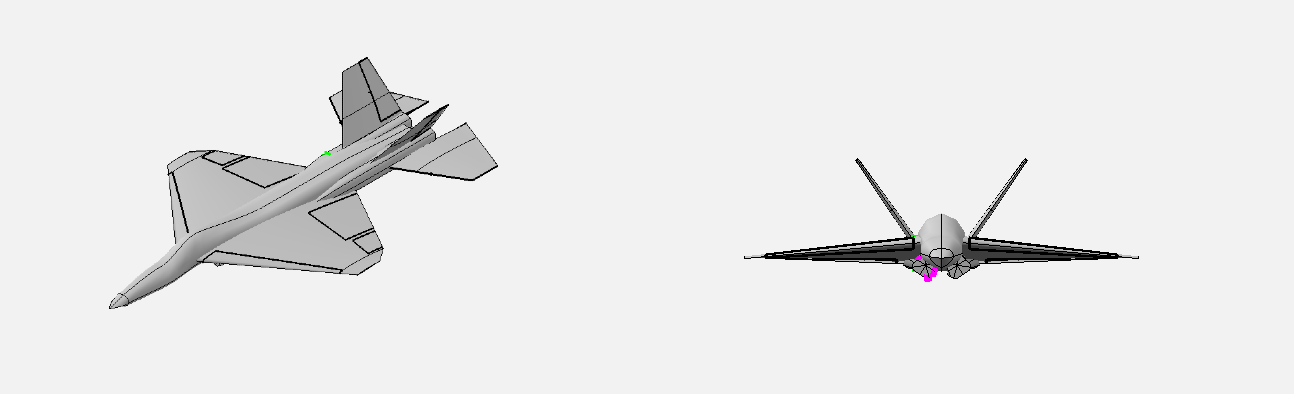
Supersonic Aircraft Design
Developed and validated a conceptual supersonic fighter aircraft focused on aerodynamic performance, stability, range, and mission specific configuration design. The project successfully used OpenVSP and VSPAERO to refine the aircraft geometry, evaluate pitching moment behavior, and trim the design across subsonic, supercruise, and supersonic flight conditions.