My Role
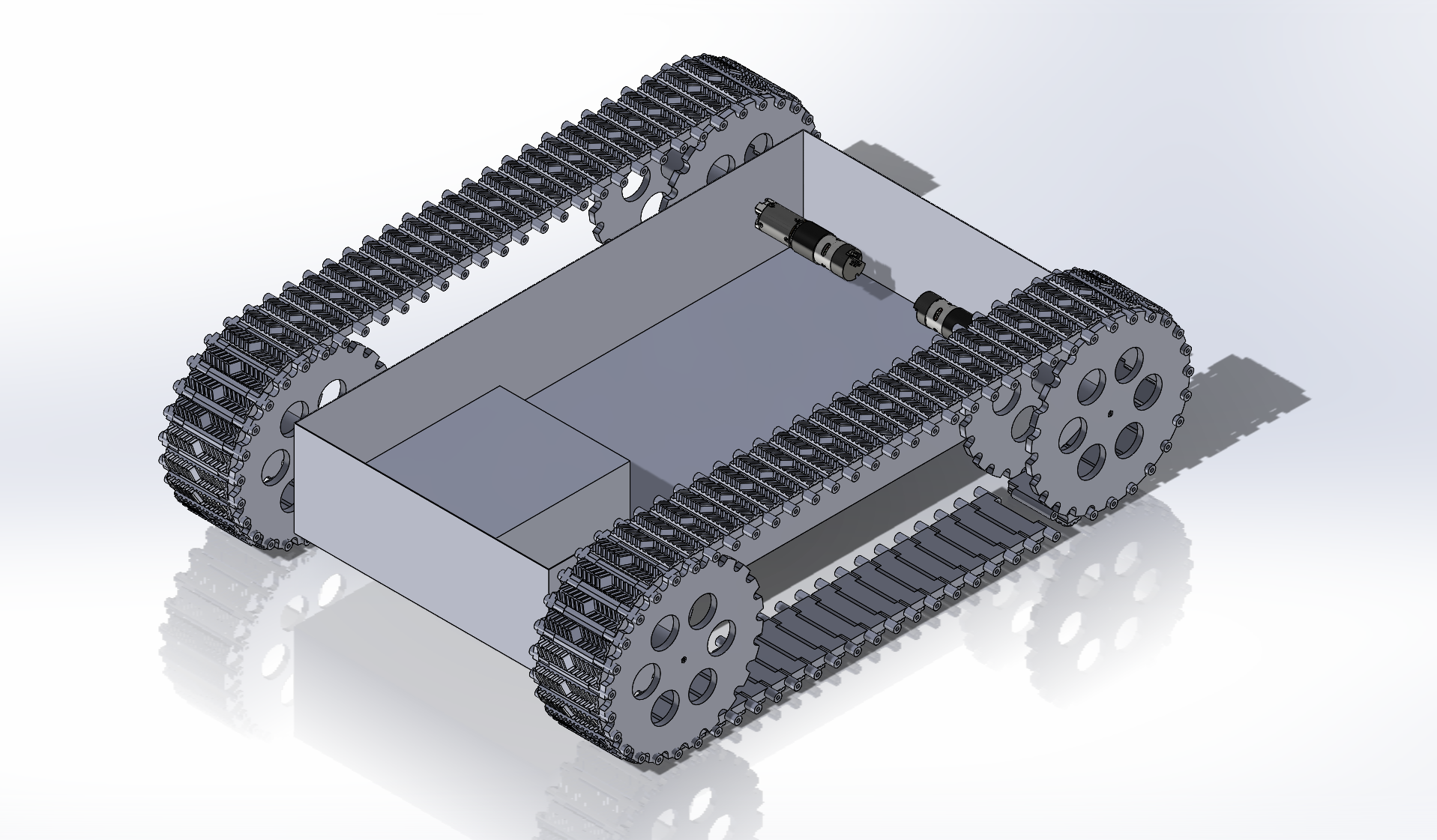
I am working on the mechanical design and drivetrain development for the robot, with a focus on the tracked mobility system. My work includes tread design, drivetrain layout, sprocket and chain selection, motor sizing, component packaging, and manufacturable prototyping in SolidWorks.
Technical Details
The drivetrain is being designed around a tracked/treaded system to improve traction and terrain capability. Design work has included evaluating tread geometry, sprocket design, motor torque requirements, drivetrain reduction, and packaging constraints within the chassis. The project also involves balancing strength, cost, printability, and ease of assembly to make the system simple to manufacture for bomb squads across the country.

